Robokäsiprojektin lopetus
Pari vuotta jatkunut CRS F3 -robokäsiprojekti on viimeisen vuoden jumittanut paikallaan. Mitä enemmän ongelmia ratkoo, sen enemmän niitä tulee vastaan, ja monet niistä perustavanlaatuisia.
Ehkä jo ennakolta olisi voinut ennustaa että robokäden mekaaninen jäykkyys ei ole parhaimmillaan jyrsintätarkoituksiin. Hieman yllätyksenä tuli sen sijaan että robokäden oma 486-prosessoriin pohjautuva ohjain ei oikein jaksa käsitellä liikepolkuja riittävällä nopeudella. Eli vaikka paikoitusresoluutio on periaatteessa 0.01mm tasolla, ei reitti pisteiden välillä ole suora vaan mutkittelee.
Kokonaisuutena olen tullut tulokseen että jyrsintätarkoituksessa robokäteen on turha käyttää enempää aikaa – sen sijaan laite on ihan toimiva jos joku keksii sille käytön. Hacklabin hallituksen kanssa on juteltu että ehkä jollain muulla Suomen hacklabeista voisi olla robokädelle tarvetta?
Uusi jyrsinprojekti
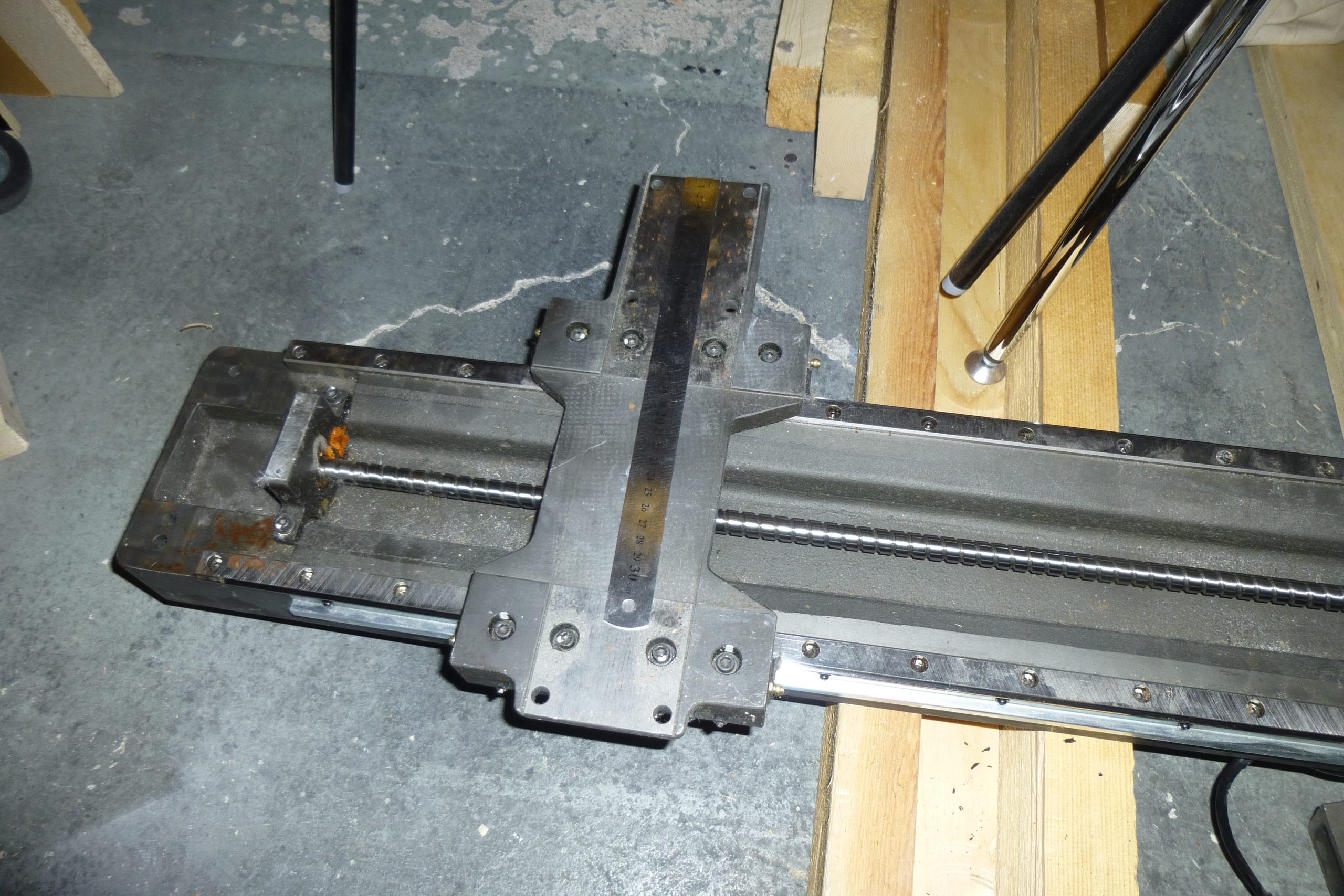
Onneksi robokäden lisäksi Hacklabilla on muutakin jännittävää bonkkia jonka parissa kuluttaa aikaansa! Jo muutaman vuoden varastossa on lojunut kasa isoja lineaariliikemoduuleita, jotka koostuvat tarkoista lineaarikiskoista ja niihin sopivista kelkoista. Moduuleita on seuraavasti:
- 3 kpl 110 cm pitkiä, joissa askelmoottorit ja hammashihnalla toteutettu liike.
- 1 kpl 100 cm pitkä, jossa kuularuuvi sekä DC-moottori ja enkooderi.
- 1 kpl 70 cm pitkä, jossa kuularuuvi sekä DC-moottori ja enkooderi.
- 2 kpl 150 cm pitkiä, joissa 3-vaihemoottorit ja litteällä hihnalla toteutettu liike.
Sandron kanssa muutama vuosi sitten hacklabille rakentamamme CNC-jyrsin ”Sergei” ei ole koskaan ollut mikään suunnittelutaidon tai tarkkuuden ihmenäyte, mutta se toimii yhä ja on ollut keskeinen työkalu monissa projekteissa.
Nyt olisi tavoitteena tehdä jotain hieman parempaa, kun käytettävät materiaalitkin ovat laadukkaampia (Sergein lineaariliikkeet koostuvat Motonetin teräsputkesta sekä skeittilaudan renkaista). Tavoitteena olisi kone jolla pääsisi luotettavasti 0.1 mm tai parempiin absoluuttisiin tarkkuuksiin ja pystyisi jyrsimään myös terästä.
Perusrakenne
Robokättä varten rakennettu koppi on ihan käyttökelpoinen, joskin muoto asettaa omat rajoitteensa jyrsimen koolle. Olen hahmotellut olemassaolevista moduuleista rakennetta, joka mahtuisi koppiin ja tarjoaisi mahdollisimman jäykän rakenteen sekä suurehkon jyrsintäalueen.
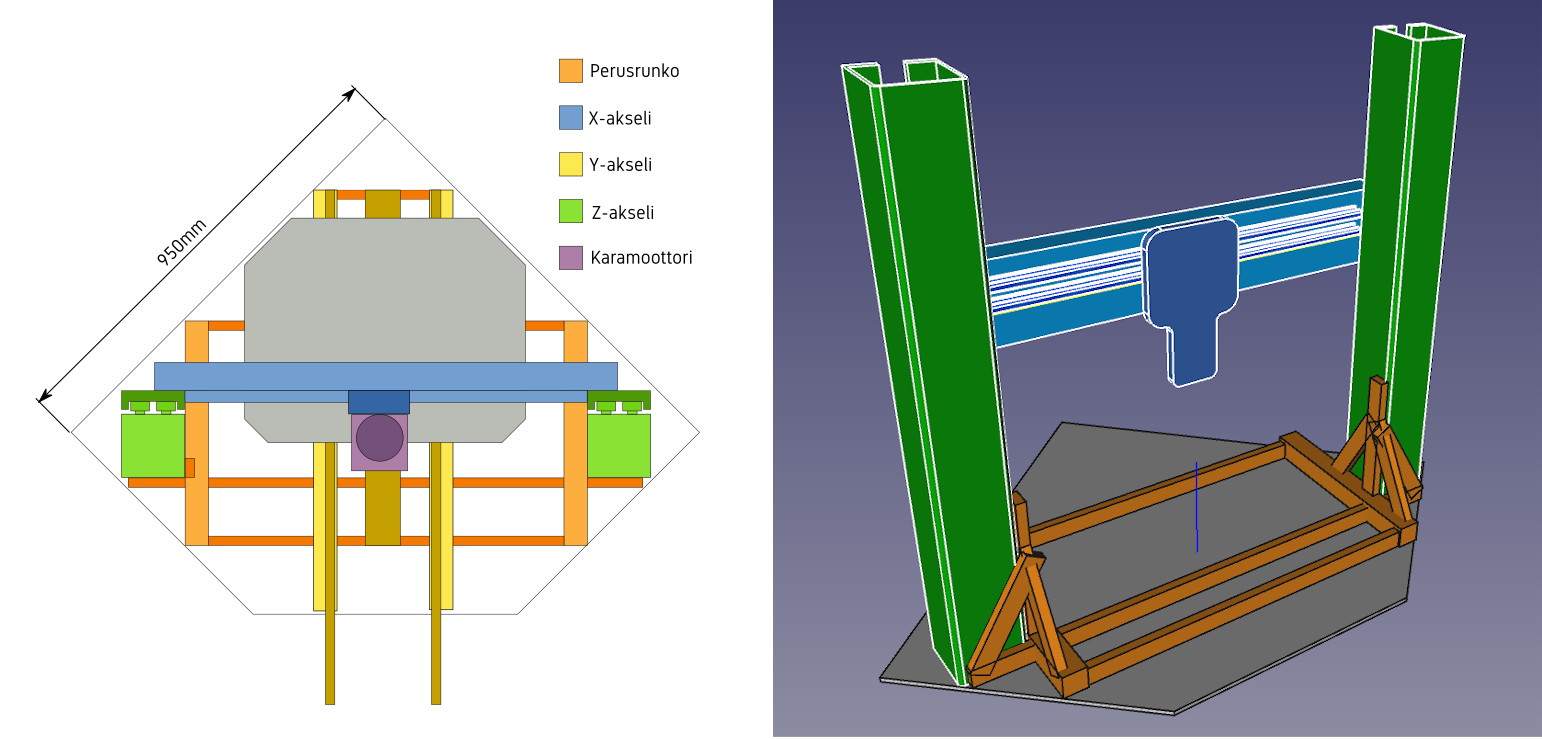
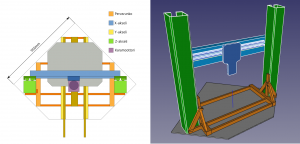
Perusrakenteena olen päätynyt ns. fixed gantry -mekanismiin, jossa X-akseli pysyy paikallaan ja työstöalusta liikkuu Y-suunnassa sen alla. Tämä rakenne tarjoaa yleensä parhaan jäykkyyden, koska kiinteä X-akseli on mahdollista kiinnittää runkoon tukevasti. Lisäksi tässä tapauksessa jyrsimen levein kohta pysyy paikkallaan, mikä helpottaa sen sovittamista koppiin.
Parhaat eli kuularuuveilla varustetut lineaariliikkeet on varattu X- ja Y-akselien toteutukseen. Kuularuuveissa välys eli backlash on minimoitu, jolloin liikkuva kelkka pysyy samassa kohdassa vaikka siihen kohdistuvan voiman suunta vaihtelisi.
Z-suunnassa käytetään 110 cm pitkiä lineaarimoduuleita, mutta alkuperäisen hihnavedon tilalle täytyy vaihtaa trapetsiruuvi. Z-suunnassa trapetsiruuvin isompi välys ei ole niin ongelma, koska liikkuvien osien paino painaa kelkat aina alimpaan asentoonsa. Koko X-akselin lineaarimoduuli liikkuu siis ylös ja alas, ja kummassakin päässä sitä kannattelee Z-akselin trapetsiruuvit.
Työstöalustan liikettä varten voidaan käyttää kolmannen 110 cm lineaarimoduulin osia. Valmis 70 cm moduuli on hyvä työstöalustan liikuttamiseen, mutta sen on liian kapea jotta se itsessään kannattelisi leveää alustaa joka kohdasta.
Työstöalueeksi tulisi näillä suunnitelmilla suunnilleen 60 x 40 cm ja kappaleen maksimikorkeudeksi n. 50 cm.
Pölysuojaus
Yksi Sergein puutteista on olematon pölysuojaus. Puutyötilassa piisaa aina puupölyä, joka laskeutuu rasvatuille pinnoille ja muodostaa osia jumittavan tahnan. Uudessa jyrsimessä täytyy jo rakenteita suunnitellessa ottaa pölysuojaus huomioon.
X- ja Z-akselin lineaariliikkeet ovat rakenteeltaan palkkimaisia. Niiden pölysuojaus voidaan tehdä ympäröimällä koko palkki esim. kankaisella pussilla, joka on päistään paikallaan ja keskiosa liikkuu kelkan mukana.
Y-akseli on kiinni alustassa, joten sitä ei pysty ympäröimään. Sen sijaan voidaan hyödyntää haitari- eli bellows-tyylistä pölysuojaa, joita saa valmiina. Suojus kiinnitetään jälleen päistään, ja se laajenee tai kutistuu kelkan liikkeen mukana.
Rakenteen jäykkyys ja värähtelyt
Jotta teräksen jyrsintä onnistuisi järkevillä nopeuksilla, täytyy jyrsimen rungon välittää jyrsinpäähän kohdistuvat voimat työstettävään kappaleeseen ilman että mikään osa välissä joustaa liikaa. Rakenteiden jäykkyyttä voidaan parantaa sekä tekemällä ne paksummasta materiaalista, että lisäämällä viistottaisia tukirakenteita.
Käytännössä kriittisimmät ovat kaksi pystysuuntaista Z-akselia sekä niiden liitos runkoon. Z-akselien yläpäähän voi lisätä jonkinlaisen palkin tai levyn, joka pitää ne vakioetäisyydellä ja estää runkoa vääntymästä sivusuunnassa. Alapäästä Z-akselit täytyy kiinnittää runkoon niin, että työstöalusta pysyy aina kohtisuorassa Z- ja X-akseleihin verrattuna. Alaosassa on syytä olla mahdollisimman suuret vinotuet, ilman että ne kuitenkaan tulevat liikkuvien osien tielle.
Vaikeasti ennustettavista värähtelytaajuuksista riippuen jyrsimen runko saattaa alkaa resonoida jyrsinterän kanssa, mikä aiheuttaa sekä jälkiä työstettävään kappaleeseen että älyttömästi melua. Yleinen ratkaisu tähän on täyttää metalliputkista tehty runko sopivalla vaimennusmassalla, esimerkiksi epoksin ja kivimurskan sekoituksella. Tämä ratkaisu sopinee tähänkin koneeseen, kunhan ensin varmistuu ettei perusrakenteeseen tarvitse tehdä enää muutoksia.
Projektiin mukaan?
Tämä projekti on vasta suunnitteluasteella ja apu on tervetullutta. Tiedossa on suunnittelun lisäksi ainakin metallitöitä ja hitsaamista, sekä projektin edetessä elektroniikkapuolta. Myös siitä on apua, jos joku jaksaa tehdä CAD-suunnittelua.
Ensimmäisenä vaiheena on perusrungon hitsaaminen teräsputkista. Tämän jälkeen täytyy asentaa Z-akselin moduuleihin trapetsiruuvit. X-akseli sopii käytettäväksi sellaisenaan. Työstöalustan kiinnitys vaatii eniten muutoksia valmiisiin osiin, joten se kannattaa tehdä viimeisenä kun kokemusta on kertynyt enemmän.
Ohjaussovellukseksi sopinee LinuxCNC, kuten Sergeissäkin on käytössä. Elektroniikan osalta vaaditaan sopivat moottoriohjaimet sekä takaisinkytkentä enkoodereilta tietokoneelle.
Yksi kommentti artikkeliin ”Rakennetaan uusi CNC-jyrsin”